// Cool Robot!
As the Team President on MuddSub (see the Experience section), I designed the PCB system of our new robot, Crush (left). This involved designing the circuit, modeling the PCB, and refining a bill of materials. I also worked with the mechanical subteam to optimize space allocation for our electronics enclosure. I also handle a lot of logistical and administrative things that come up with an awesome club!

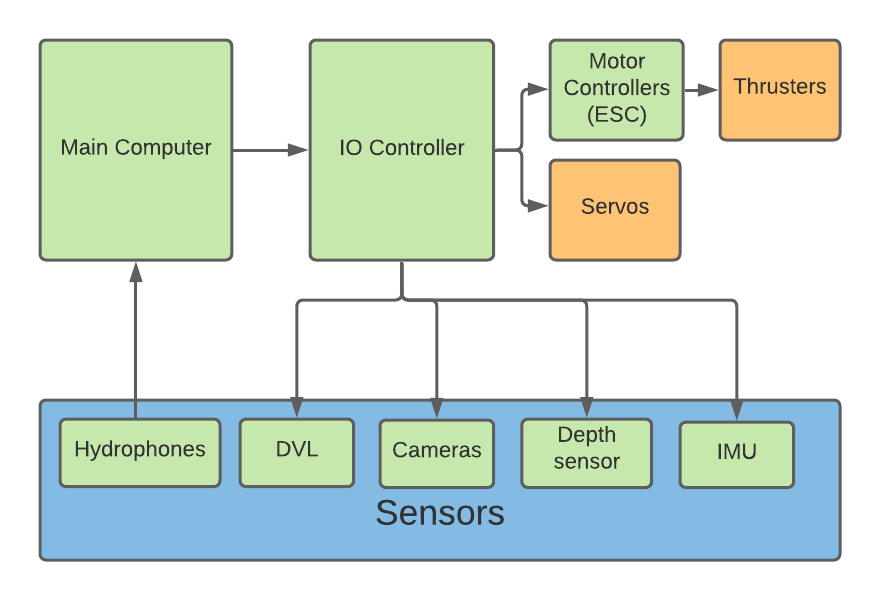
But PCBs are only part of the story. Coming from an electircal background, I worked with the Electrical subteam which also designs, connects, and tests all of our sensors. We work and test various directional hydrophones to detect the robot's location. We also are working with split-aperture correlators to more precisely determine Crush's position. Our main electrical subteam connections are detailed in the schematic above on the right.